Gesture Controlled Robot Using Accelerometer Project Report Journals
Pdf Development Of Gesture Controlled Robot Using 3 Axis Accelerometer
Pdf Gesture Controlled Mobile Robotic Arm Using Accelerometer
Pdf Design And Implementation Of Gesture Controlled Robotic Arm For Industrial Applications
Pdf Gesture Controlled Robot Using Image Processing

Pdf Design And Implementation Of A Wireless Gesture Controlled Robotic Arm With Vision
Pdf R3arm Gesture Controlled Robotic Arm For Remote Rescue Operation
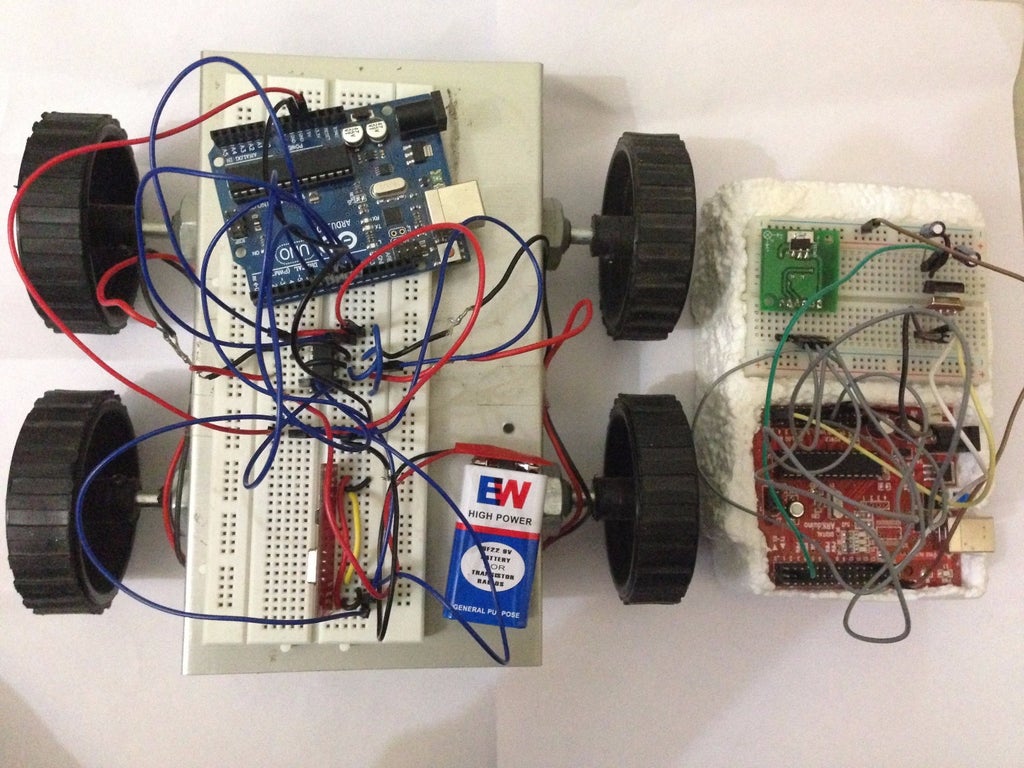
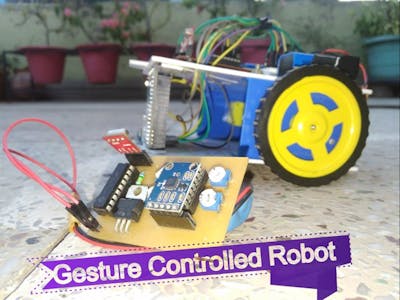
In this project we have used hand motion to drive the robot.
Gesture controlled robot using accelerometer project report journals.

Pdf Development Of Gesture Controlled Robot Using Flex Sensor And Accelerometer Roshan Gabhane And V H Somkuwar Gmail Com Somkuwar Academia Edu
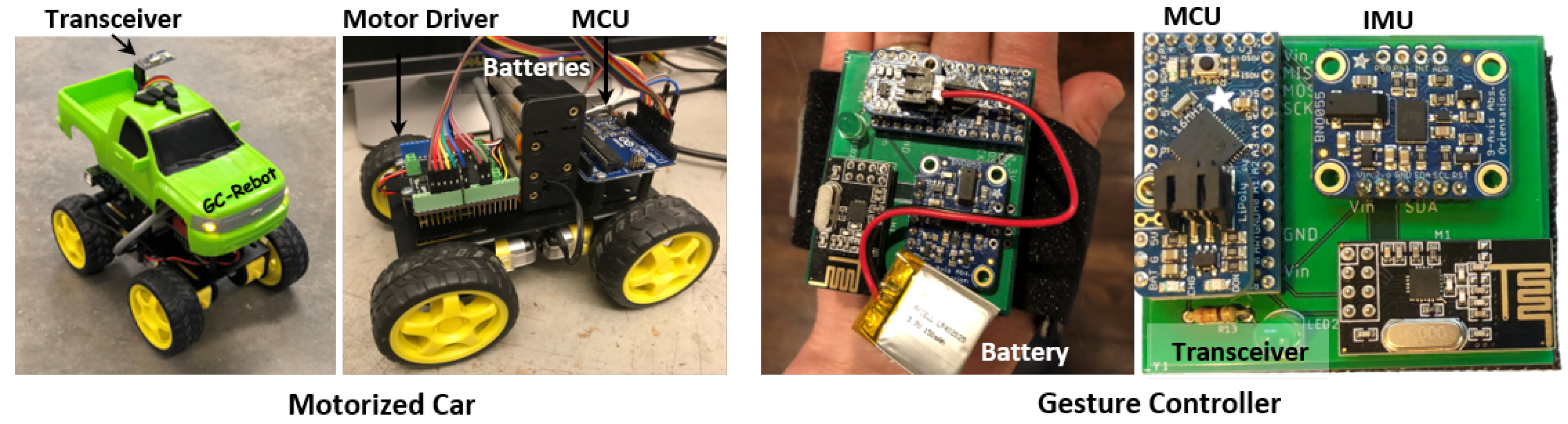
Pdf A Hand Gesture Based Control Interface For A Car Robot
Http Www Ijsdr Org Papers Ijsdr1805055 Pdf

Project File Of Gesture Controlled Robot Operational Amplifier Transmitter
Http Www Ijetsr Com Images Short Pdf 1520496606 155 161 Ieteh128 Ijetsr Pdf
Gesture Controlled Robot Using Arduino 7 Steps Instructables

Pdf Designing And Implementation Of A Low Cost Wireless Gesture Controlled Robot For Disable People
Pdf Virtual Telepresence And Gesture Controlled Robot
Http Www Academicscience Co In Admin Resources Project Paper F201510201445323321 Pdf
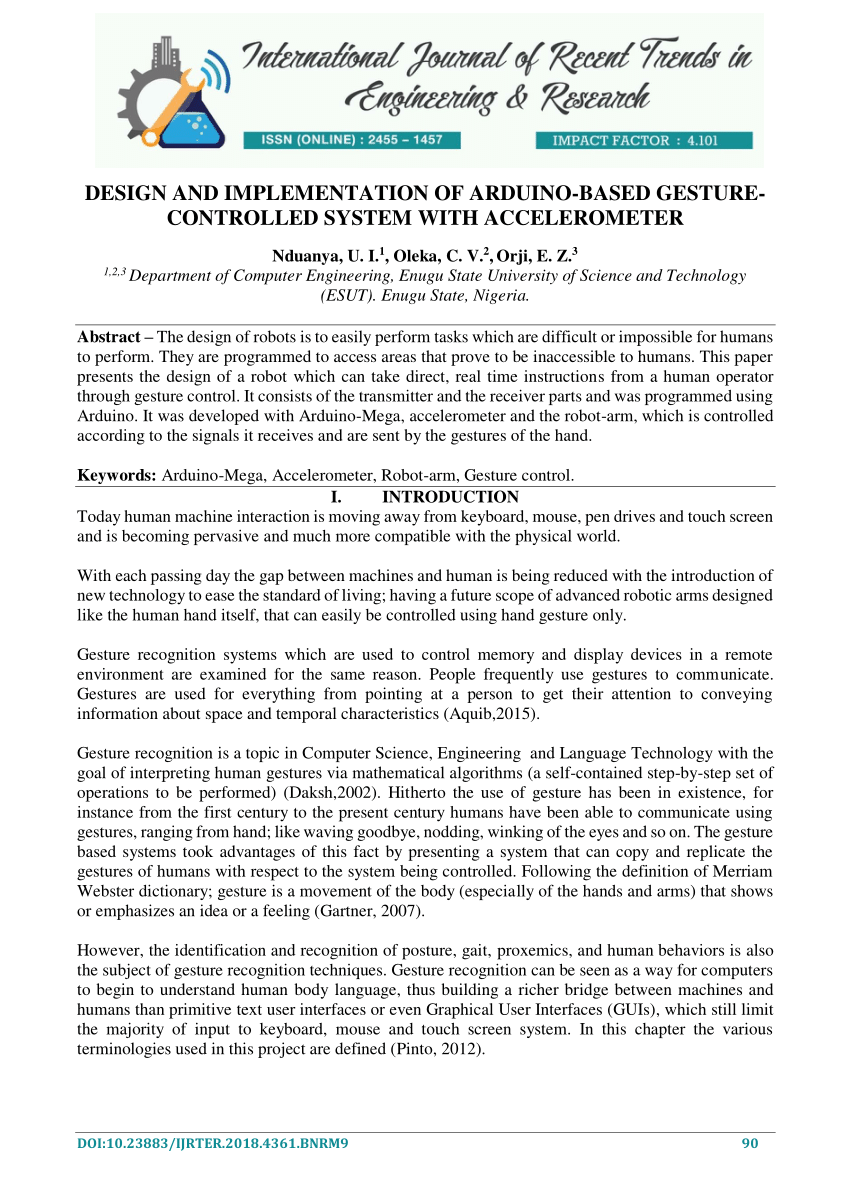
Pdf Design And Implementation Of Arduino Based Gesture Controlled System With Accelerometer

Pdf Gesture Controlled Robot Using Arduino And Android

Pdf Gesture Recognition And Control Part 1 Basics Literature Review Different Techniques International Journal Ijritcc Academia Edu
Sensors Free Full Text A Gesture Controlled Rehabilitation Robot To Improve Engagement And Quantify Movement Performance Html
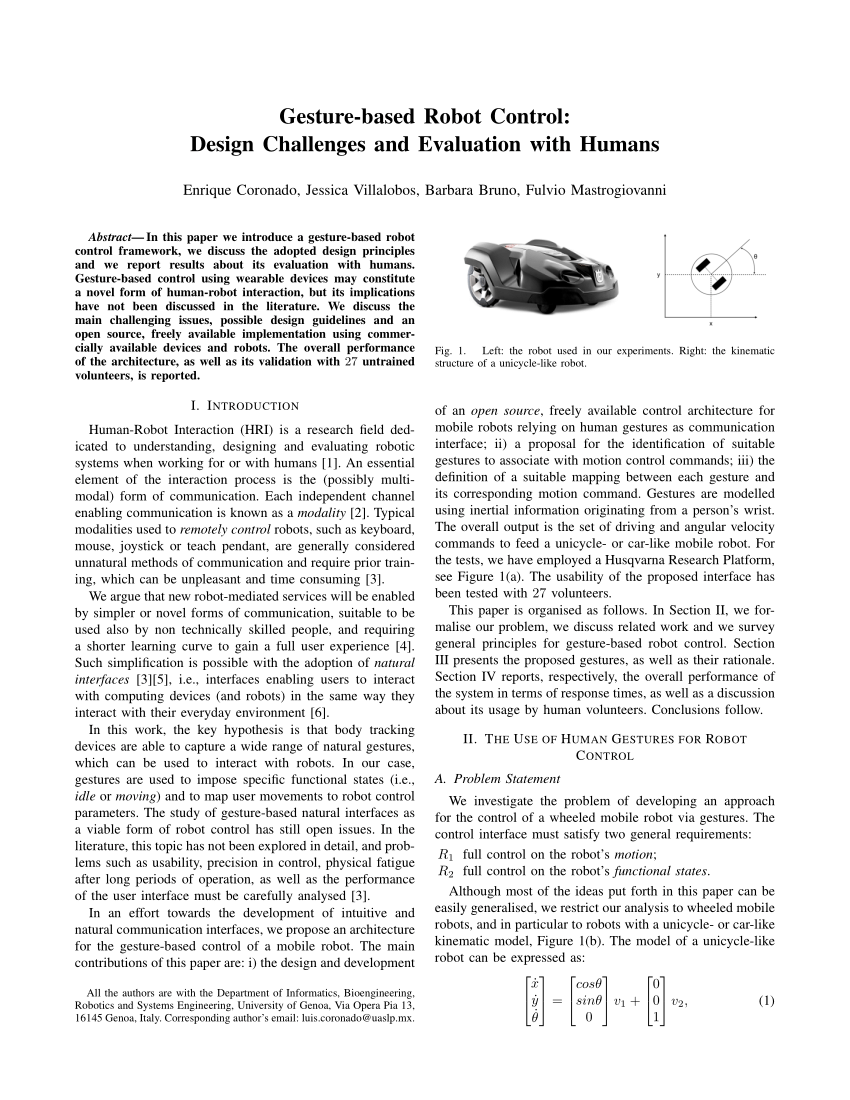
Pdf Gesture Based Robot Control Design Challenges And Evaluation With Humans
Pdf Hand Gesture Controlled Drones An Open Source Library
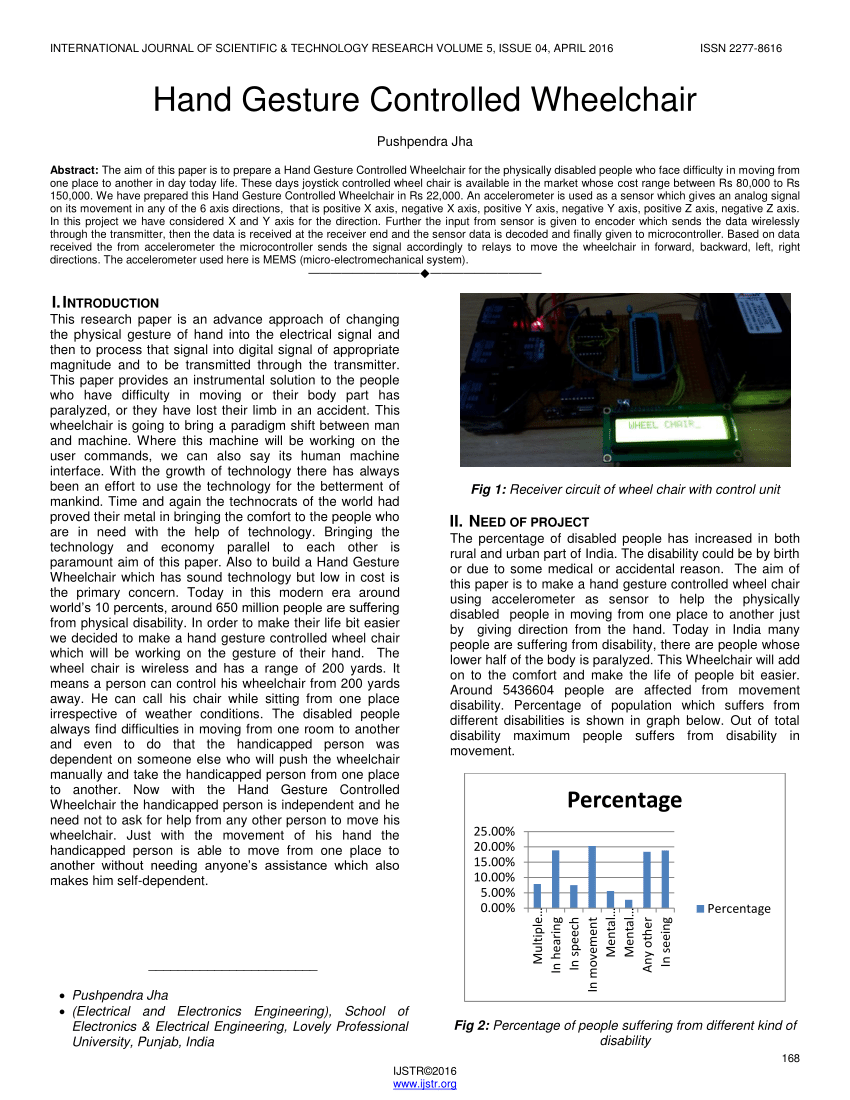
Pdf Hand Gesture Controlled Wheelchair

Pdf Hand Motion Controlled Robotic Arm Based On Micro Electro Mechanical System Sensors Gyroscope Accelerometer And Magnetometer
Gesture Controlled Robot Arduino Project Hub

Making A Gesture Controlled Robot Using Your Smartphone Arduino Project Hub
Source : pinterest.com
