Gesture Controlled Robot Using Accelerometer Project Report
Pdf Development Of Gesture Controlled Robot Using 3 Axis Accelerometer
Pdf Gesture Controlled Robot Using Arduino And Android
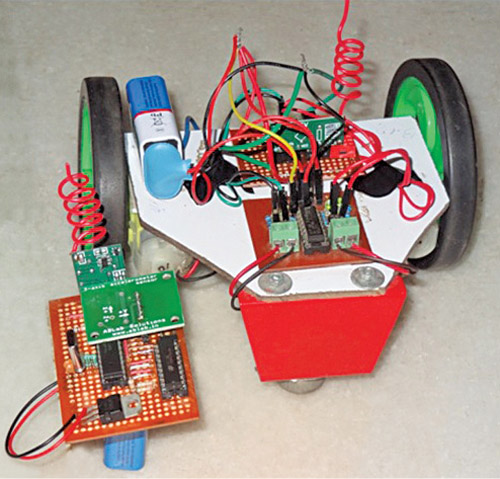
Wireless Gesture Controlled Robot Full Project With Source Code
Project Report On Hand Gesture Controlled Robot Part 2

Pdf Development Of Gesture Controlled Robot Using Flex Sensor And Accelerometer Roshan Gabhane And V H Somkuwar Gmail Com Somkuwar Academia Edu
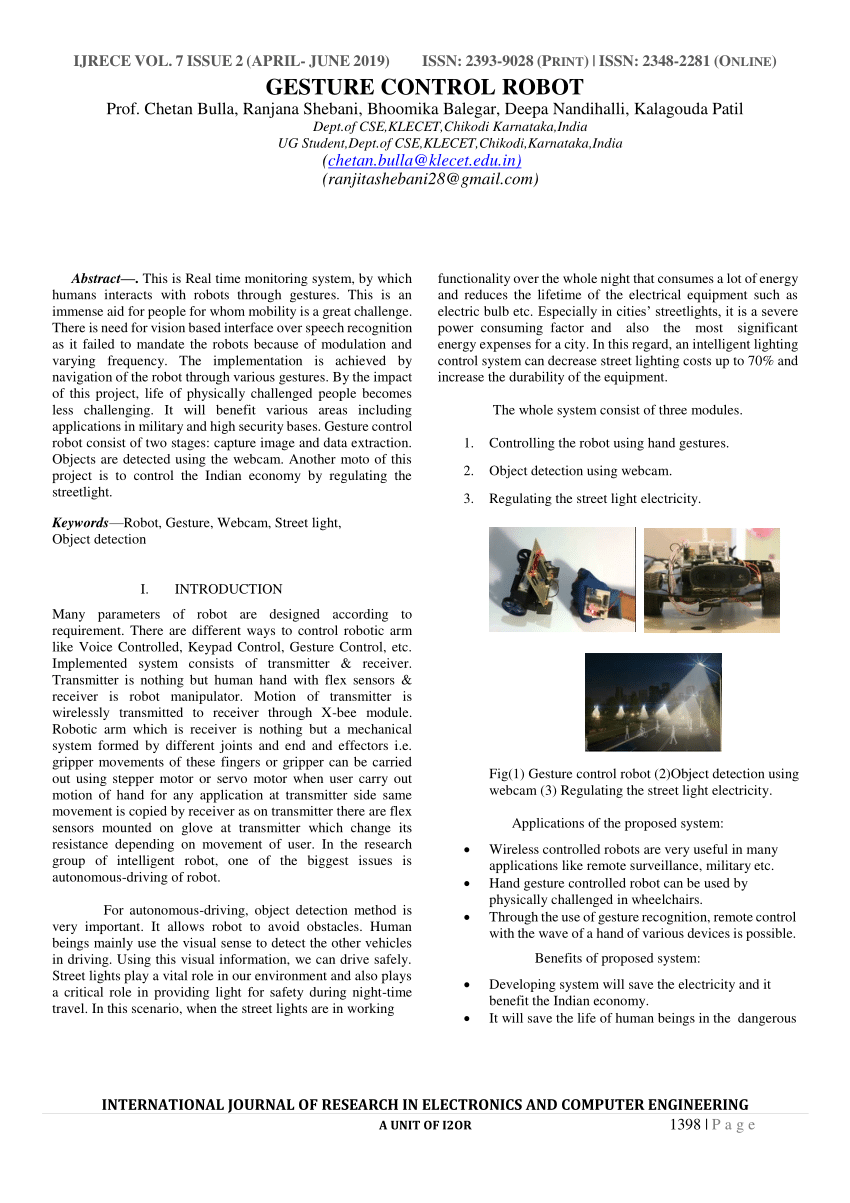
Pdf Gesture Control Robot

A survey a design of real time control robot system.
Gesture controlled robot using accelerometer project report.

Gesture Control Robot Working With Applications
Pdf Gesture Controlled Mobile Robotic Arm Using Accelerometer
Accelerometer Based Hand Gesture Controlled Robot Using Arduino

Pdf Design And Implementation Of A Wireless Gesture Controlled Robotic Arm With Vision
Pdf Design And Implementation Of Gesture Controlled Robotic Arm For Industrial Applications
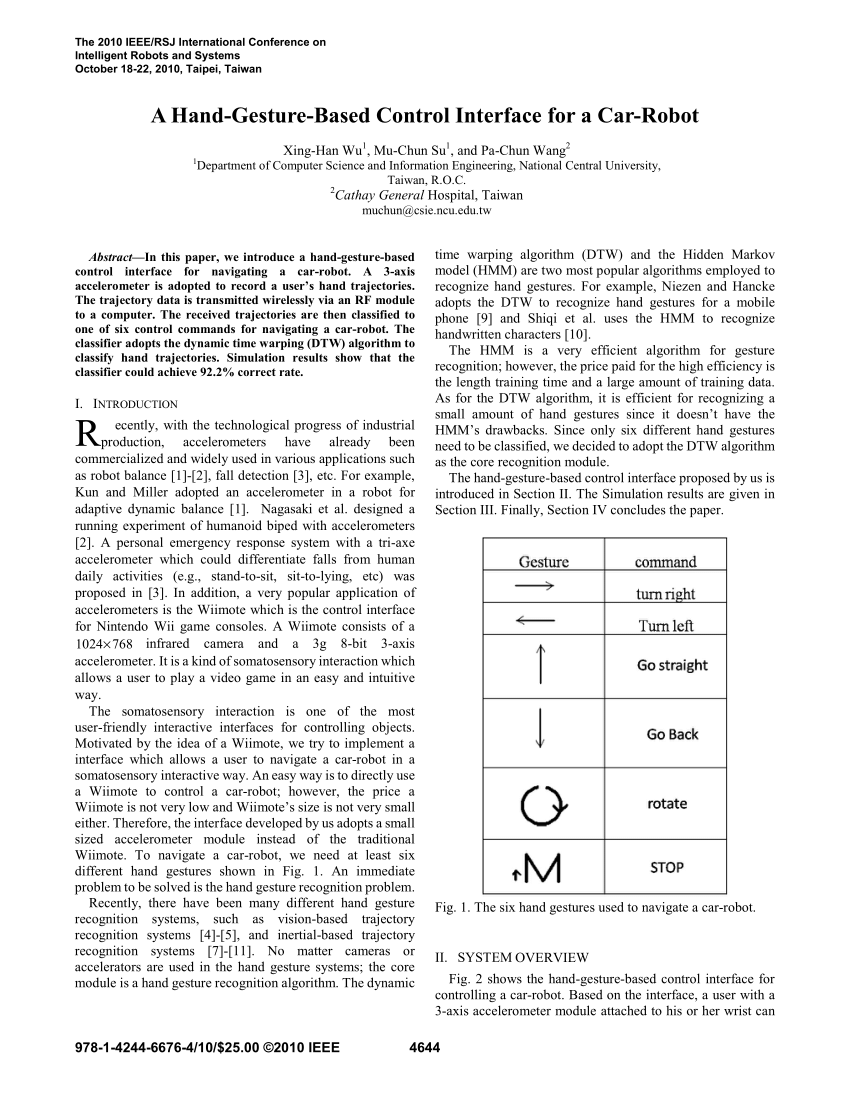
Pdf A Hand Gesture Based Control Interface For A Car Robot
Gesture Controlled Robot Arduino Project Hub

Making A Gesture Controlled Robot Using Arduino Control Glove Without Flex Sensor Using Hall Effect Sensor And Acceleromet Hall Effect Sensor Accelerometers
How To Make A Gesture Control Robot At Home Youtube Real Steel Humanoid Robot Robot

Project File Of Gesture Controlled Robot Operational Amplifier Transmitter
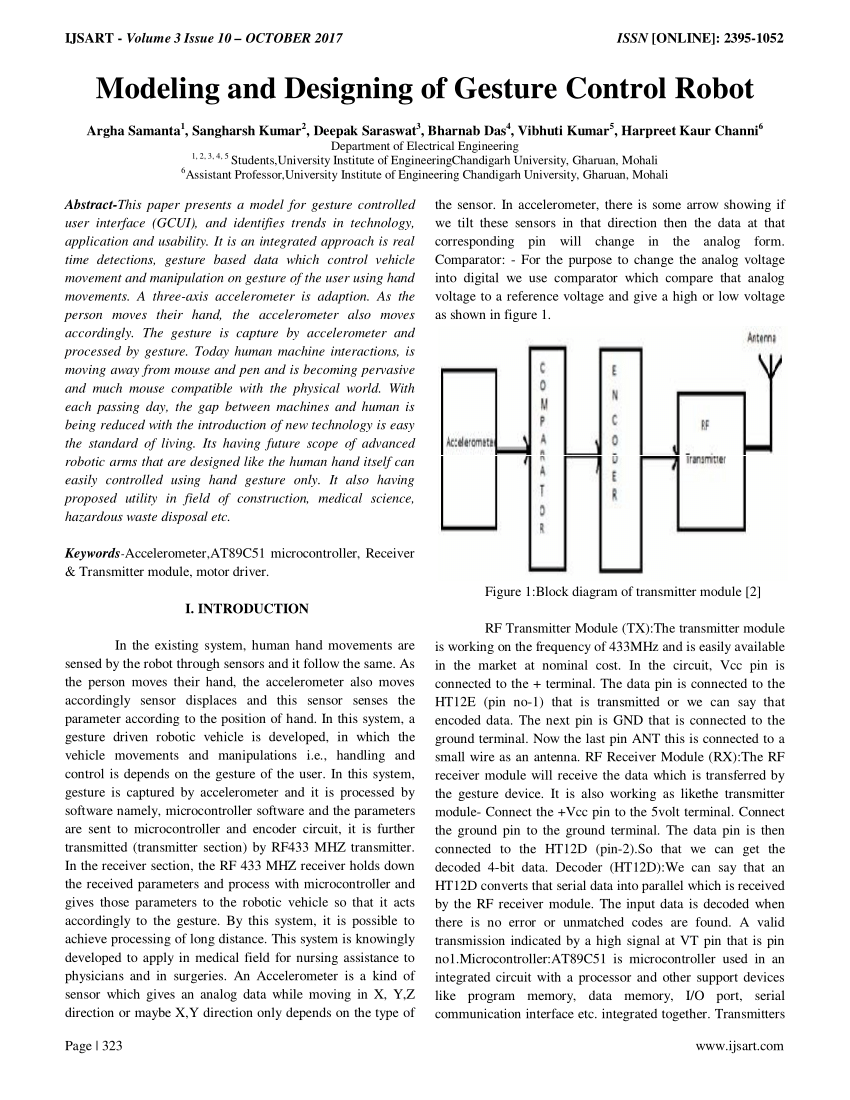
Pdf Modeling And Designing Of Gesture Control Robot
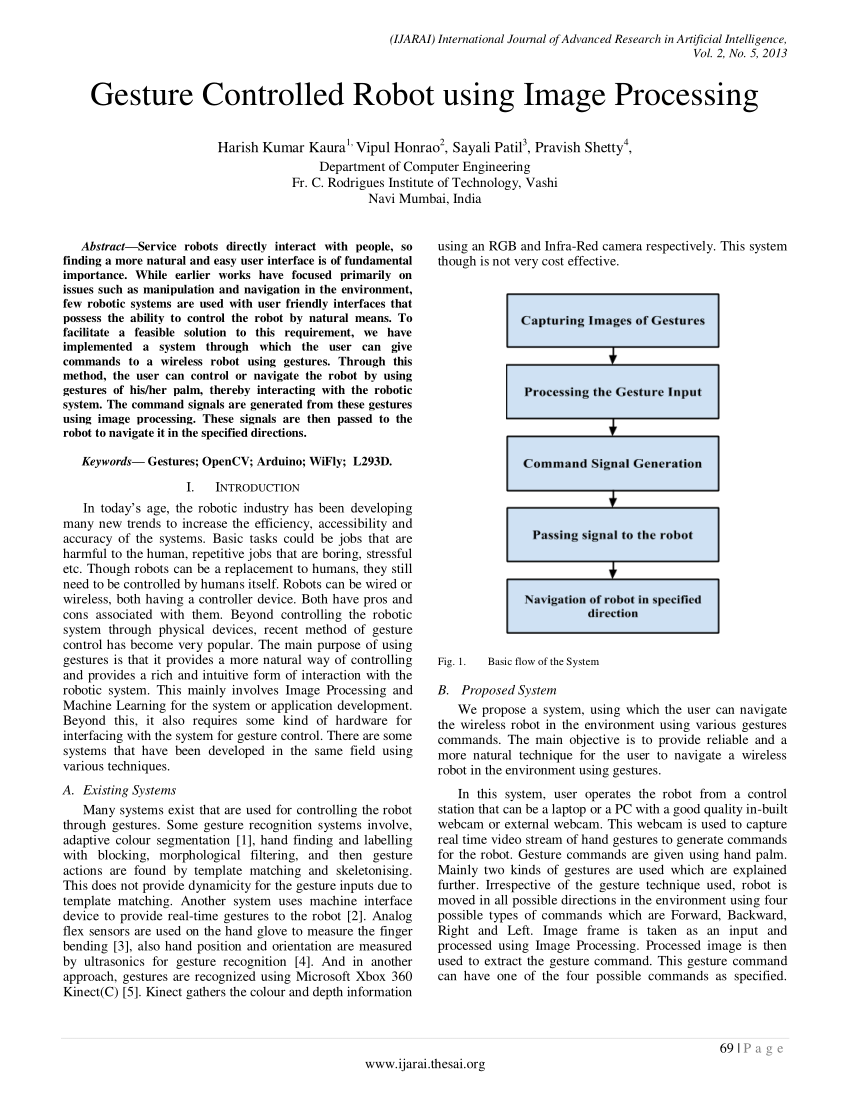
Pdf Gesture Controlled Robot Using Image Processing

Hand Gesture Controlled Robotic Vehicle Docsity

Block Diagram Of Transmitter Accelerometers Led Power Supply Block Diagram

Accelerometer Based Hand Gesture Controlled Robot
Pdf Gesture Control Robotic Arm Using Flex Sensor

Making A Gesture Controlled Robot Using Your Smartphone Arduino Project Hub
Pdf Gyro Accelerometer Based Control Of A Robotic Arm Using Avr Microcontroller
Arduino Earthquake Detector Alarm Using Accelerometer Adxl335 To Detect The Pre Earthquake Vibrations Whenever It Dete Arduino Arduino Projects Arduino Shield
Source : pinterest.com
